Enter the Matrix – UNICORN style (a.k.a. a Matrix scroller in MicroPython on the Pimoroni PicoUnicorn Hat)
As a software engineer I often write code that runs (hopefully) fine in the background, does its job and you probably never see it again. That dragged me to buy a unicorn hat for my first Raspberry Pico, as I’d like to see some fancy output of my spare time project. After some time of programming Python for Picos and other Raspberries I finally found enough time to finish the first step of my unicorn hat showcase project: a Matrix scroller with changeable colors, directions, scroll speed and line patterns.
This is probably not a good introduction to (Micro-)Python coding as it is a bigger project with a little more complex code as you would expect for beginner guides – so if you are new to Python or programming itself, and are struggling with my code – don’t worry: If you want to learn more about Python have a look at the great Corey Schaefers Python videos on Youtube and be happy.
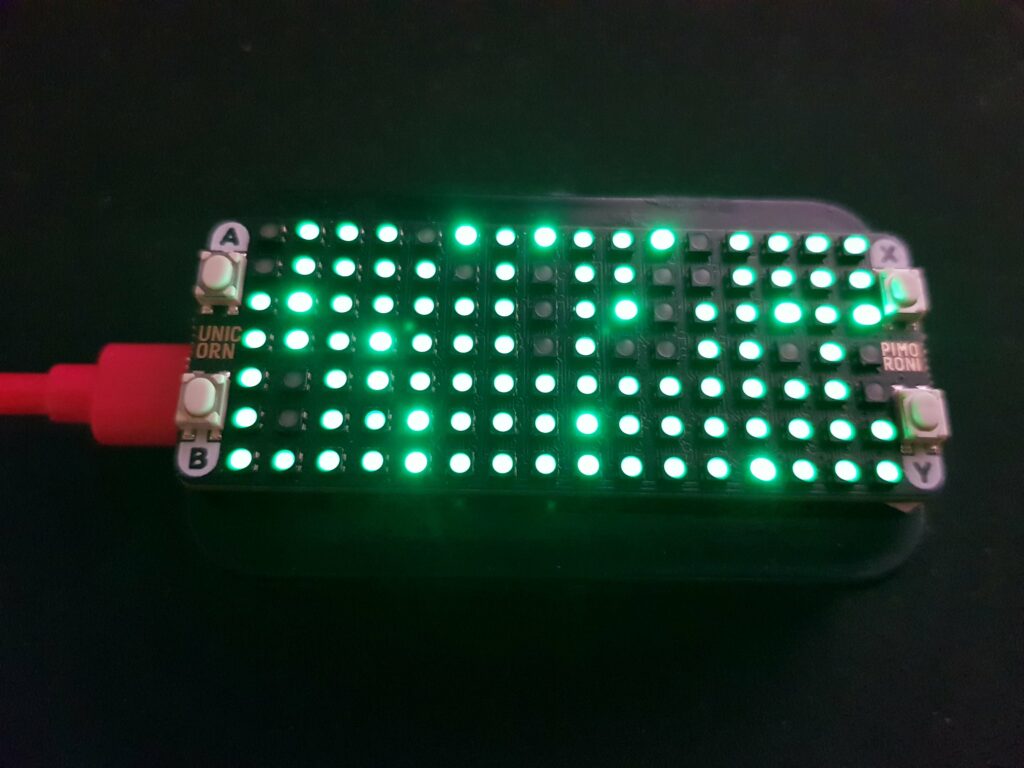


The unicorn hat has 7*16 RBG LEDs and four buttons and I wanted to put all them to good use.
Each 7 LEDs from a column are represented by a MatrixLine in the code. A line itself consists of three parts, which in the case of the well known Matrix Screensaver is brighter shorter part, followed by a similar but darker part, then an optional dark part as gap until it starts again with the brighter start part. When the lines are scrolled (moved down) and it is not long enough to fill the whole height, the next part is added to it. The parts are defined as length ranges and are randomized each time a part is added to a line to achieve similar line patterns, but with some variation. There are 10 line compositions atm ranging from standard matrix to random single rain drops.
The colors are RGB values for the different parts of a line. At the moment 12 color sets are defined and can be cycled through. Green, red, blue and white in three brightness gradation.
The scrolling speed of the lines are defined by delay ranges. After the delay the dots of the line are moved down one LED. The shorter the delay, the faster it moves. The delay of each line is randomized after the brighter starting part was added to the line.
A direction change or even random directions of the lines (up or down) give the scroller app completely new look and feels. Sorry to be biased, but I like it 😛
Button functionality (can be held to cycle through)
A: color / brightness
B: scrolling speed
X: scrolling direction
Y: line composition
Coding is done in Python on the pimoroni MicroPython. There are multiple loops running which are either timed (line scrolling) or event based (button and trigger handling). All run asynchronously on one core of the Pico using uasyncio tasks and its loop.
Get the code from my github: https://github.com/worksonmymachine-de/raspberry_pico_pimoroni_unicorn/blob/main/matrix.py
import uasyncio
import random
import picounicorn
# triggers - used for program control in async environment
TRIGGER_RUN, TRIGGER_1, TRIGGER_2, TRIGGER_3, TRIGGER_4 = 0, 1, 2, 3, 4
triggers = (TRIGGER_1, TRIGGER_2, TRIGGER_3, TRIGGER_4)
ACTIVE_TRIGGER = TRIGGER_RUN
WIDTH, HEIGHT = 16, 7 # pico unicorn constants
START, BODY, GAP = 0, 1, 2 # line parts
line_parts = (START, BODY, GAP)
delays = ( # the lower the value the faster it moves
(0.2, 0.4), (0.1, 0.2), (0.07, 0.1), (0.05, 0.07), (0.03, 0.05), (0.02, 0.03), (0.01, 0.02), (0.005, 0.01))
_black = (0, 0, 0) # color combinations - rbg values for start, body and gap
colors = (
((0, 120, 0), (0, 40, 0), _black), # green
((180, 0, 0), (70, 0, 0), _black), # red
((0, 0, 120), (0, 0, 50), _black), # blue
((80, 80, 80), (30, 30, 30), _black), # white
((0, 255, 0), (0, 90, 0), _black), # bright_green
((255, 0, 0), (90, 0, 0), _black), # bright_red
((0, 0, 255), (0, 0, 90), _black), # bright_blue
((255, 255, 255), (100, 100, 100), _black), # bright_white
((0, 60, 0), (0, 20, 0), _black), # dark_green
((90, 0, 0), (25, 0, 0), _black), # dark_red
((0, 0, 60), (0, 0, 25), _black), # dark_blue
((50, 50, 50), (20, 20, 20), _black), # dark_white
)
# lengths in dots of starting (bright) part, following dots and dots inbetween
compositions = (((1, 1), (4, 15), (1, 3)), # medium long, short start
((1, 3), (7, 25), (2, 4)), # longer start and lines
((1, 2), (4, 15), (0, 0)), # no gap
((1, 1), (3, 10), (1, 2)), # shorter lines
((0, 0), (4, 15), (1, 3)), # no start
((0, 0), (1, 2), (3, 10)), # rain drops with long gap
((0, 0), (1, 1), (10, 30)), # small rain drops with very long gap
((0, 0), (0, 1), (20, 50)), # very few small rain drops with very long gap
((1, 1), (0, 0), (10, 30)), # small shiny rain drops with very long gap
((0, 1), (0, 0), (20, 50))) # very few shiny small rain drops with very long gap
# directions in which the lines will scroll
downwards, upwards = lambda y: HEIGHT - 1 - y, lambda y: y
directions = (lambda: downwards, lambda: upwards, lambda: random.choice((downwards, upwards)))
def next_index(values: (), current_index: int) -> int:
return current_index + 1 if current_index + 1 < len(values) else 0
def random_range(limit: (int, int)) -> int:
return random.randint(limit[0], limit[1])
def random_range_factor(limit: (float, float), factor=1000) -> float:
return random_range((int(limit[0] * factor), int(limit[1] * factor))) / factor
def init_picounicorn() -> None:
picounicorn.init()
for x in range(picounicorn.get_width()):
for y in range(picounicorn.get_height()):
picounicorn.set_pixel_value(x, y, 0)
class Matrix:
def __init__(self, config=(0, 0, 2, 0)):
self.direction_index, self.color_index, self.delay_index, self.composition_index = config
self.lines = self._create_lines()
self.trigger_methods = {TRIGGER_1: self.cycle_colors, TRIGGER_2: self.cycle_scrolling_speeds,
TRIGGER_3: self.cycle_scrolling_directions, TRIGGER_4: self.cycle_line_compositions}
self.matrix_cache = [[GAP for _1 in range(HEIGHT)] for _2 in range(WIDTH)]
self.start_loops()
async def cycle_colors(self) -> None:
self.color_index = next_index(colors, self.color_index)
for x in range(WIDTH): # instantly applying new color (not waiting for scrolling delay)
self.update_line(x, self.matrix_cache[x], self.lines[x].dir_supplier, cache=False)
async def cycle_scrolling_speeds(self) -> None:
self.delay_index = next_index(delays, self.delay_index)
for line in self.lines: # applying new scrolling speed (delay)
line.current_delay = random_range_factor(delays[self.delay_index])
async def cycle_scrolling_directions(self) -> None:
self.direction_index = next_index(directions, self.direction_index)
for line in self.lines: # applying new scrolling direction
line.dir_supplier = directions[self.direction_index]()
async def cycle_line_compositions(self) -> None:
self.composition_index = next_index(compositions, self.composition_index)
for x, line in enumerate(self.lines): # shortening very long lines to see comp change earlier
line.dots = line.dots[0: len(line.dots) - 20] if HEIGHT <= len(line.dots) >= 40 else line.dots
def _create_lines(self) -> []:
return [MatrixLine(x_coord=i, comp_supplier=lambda: compositions[self.composition_index],
delay_supplier=lambda: delays[self.delay_index],
dir_supplier=directions[self.direction_index](),
shift=random_range((HEIGHT, 17)), # initial shift of line start
callback_show=self.update_line) for i in range(WIDTH)]
async def handle_toggle_triggers(self) -> None:
global ACTIVE_TRIGGER
while True:
if ACTIVE_TRIGGER in triggers:
await self.trigger_methods.get(ACTIVE_TRIGGER)()
ACTIVE_TRIGGER = TRIGGER_RUN # resetting trigger when method has been executed
await uasyncio.sleep(0)
def start_loops(self) -> None:
uasyncio.create_task(self.handle_toggle_triggers())
for line in self.lines:
uasyncio.create_task(line.scroll())
def update_line(self, x: int, line: [], direction_supplier, cache=True) -> None:
for y in range(HEIGHT):
r, g, b = colors[self.color_index][line[y]]
picounicorn.set_pixel(x, direction_supplier(y), r, g, b) # shifting up lines to the top of picounicorn
if cache:
self.matrix_cache[x] = line
class MatrixLine:
def __init__(self, x_coord: int, comp_supplier, delay_supplier, dir_supplier, shift: int, callback_show) -> None:
self.x_coord = x_coord
self.delay_supplier = delay_supplier
self.current_delay = random_range_factor(self.delay_supplier())
self.dir_supplier = dir_supplier
self.comp_supplier = comp_supplier
self.current_comp_index = 0
self.dots = [GAP for _ in range(shift)] # initial shift of line start for diversity at start
self.callback_show = callback_show
def _randomize_scrolling_speed(self) -> None:
if self.current_comp_index == START: # randomizing when we just added a start part to the line
self.current_delay = random_range_factor(self.delay_supplier())
def _add_dots(self) -> None:
for _ in range(random_range(self.comp_supplier()[self.current_comp_index])):
self.dots.append(line_parts[self.current_comp_index])
self.current_comp_index = next_index(self.comp_supplier(), self.current_comp_index)
async def scroll(self) -> None:
while True:
while ACTIVE_TRIGGER == TRIGGER_RUN:
self.dots.pop(0) # remove first dot from line for scrolling
while len(self.dots) < HEIGHT: # lengthen line if too short for display
self._add_dots()
self._randomize_scrolling_speed()
self.callback_show(self.x_coord, self.dots, self.dir_supplier)
await uasyncio.sleep(self.current_delay)
await uasyncio.sleep(0)
async def set_trigger(trigger: int) -> None:
global ACTIVE_TRIGGER
ACTIVE_TRIGGER = trigger
await uasyncio.sleep(0.3)
async def handle_buttons() -> None:
while True:
while picounicorn.is_pressed(picounicorn.BUTTON_A):
await set_trigger(TRIGGER_1)
while picounicorn.is_pressed(picounicorn.BUTTON_B):
await set_trigger(TRIGGER_2)
while picounicorn.is_pressed(picounicorn.BUTTON_X):
await set_trigger(TRIGGER_3)
while picounicorn.is_pressed(picounicorn.BUTTON_Y):
await set_trigger(TRIGGER_4)
await uasyncio.sleep(0.1)
if __name__ == "__main__":
init_picounicorn()
loop = uasyncio.get_event_loop()
Matrix()
uasyncio.create_task(handle_buttons())
loop.run_forever()
If you prefer to check it out in an IDE like PyCharm rather than Thonny and run it directly on the Pico, you will run in some problems, because your environment most probably won’t find the picounicorn and the uasyncio module. For the picounicorn I wrote a dummy implementation with debugging feats which can be found in the same repo. Workaround for uasyncio: use my uasyncio dummy implementation I wrote, but there are only the methods supported used in the code below.
I wanted to use a better collection type than a list for the line dots, because I mostly use append and pop(0), collections.deque would be a good match for that use case, but it hasn’t been implemented in MicroPython 1.18 yet. I was able to use the import, but at runtime I got the error
import collections collections.deque([1,2,3], 56) OUTPUT: Traceback (most recent call last): File "<stdin>", line 39, in <module> ValueError:
Those two tutorials were of great help for asyncio. It’s not complicated, but you have to get the hang of it before it gets easier.
Great uasyncio Tutorial to read:
https://github.com/peterhinch/micropython-async/blob/master/v3/docs/TUTORIAL.md
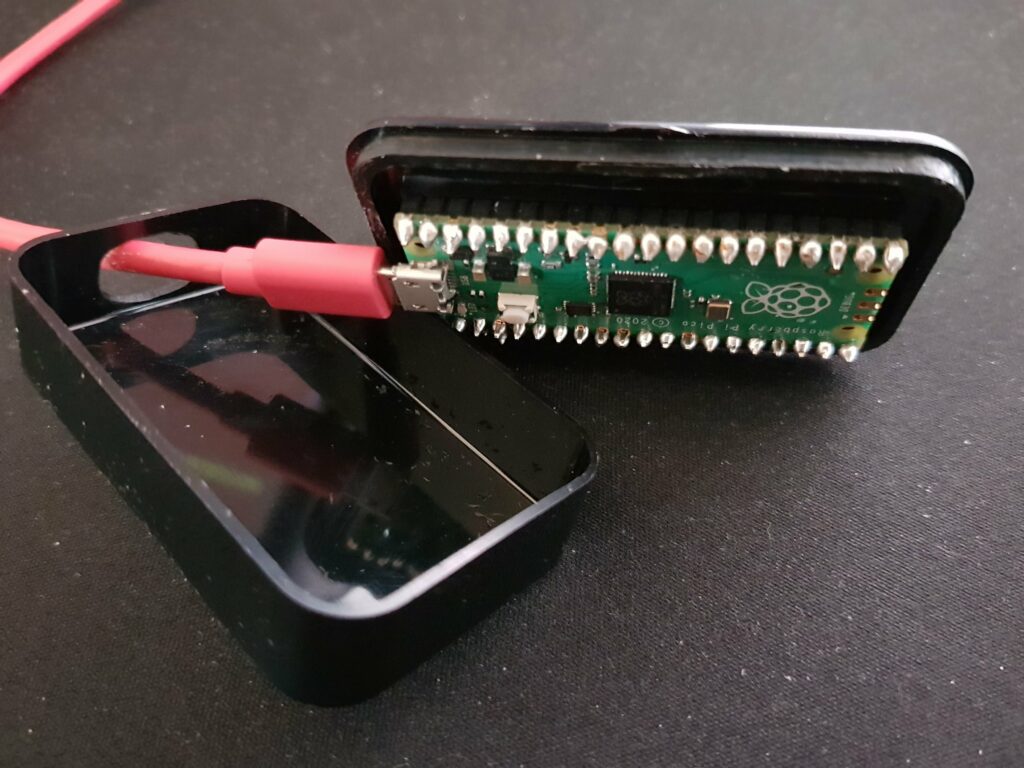
I used one of the cheapest and smallest cases for this project as it happened to fit very well for the Pico inside and the unicorn hat on the outside. Remove the Pico from the hat – it will be stuck in again from the inside when we are finished with the hat. Measure the downside pin connectors of the hat and cut a slightly smaller hole in the middle of the lid. I used a cutter knife. Please don’t repeat my stupid mistake. Either drill holes at the corners and use a louse saw or a small drilling tool like a Dremel. Cut smaller and make it bigger as needed. On the side drill a hole for the USB cable.
As the unicorn hat fitted in, I super glued small plastic nuts on the down facing corners of the hat as spacers. That way the hat is even with the lid and doesn’t stand on the pins. Super glue again the spacer nuts to the lid when the hat is stuck in. Stick in the Pico from inside, close the case and stick in the USB connector. Done.
All the links are just plain links without any affiliation. I just happen to buy most of my stuff at berrybase.de
Have fun! Even if you don’t want to buy the unicorn which is a bit expensive, you will most probably find some useful stuff in this code when you look for a scrolling animation app or how to use uasyncio.
If you have any questions or suggestions – feel free to ask them!